Problem Statement
While conducting agricultural experiments, researchers must take a variety of measurements of every research specimen. Currently this process is done manually by research technicians walking the fields.This process requires extra personnel, time and money for the project. Our clients wish to develop a
system that could automate these agricultural measurements using a robotic platform. An automated system would then reduce the personnel required, and the time spent by researchers gathering information about their specimens.
In this project, our group is designing a cooperative robotic system containing a ground vehicle and an instrumentation arm connected at a single pivot point. This instrumentation arm will then be balanced primarily by four propellers located at its top, with some assistance from the movement of the ground robot. Our main goal is to design and construct a laboratory proof of concept for such a cooperative system to demonstrate its feasibility.
While conducting agricultural experiments, researchers must take a variety of measurements of every research specimen. Currently this process is done manually by research technicians walking the fields.This process requires extra personnel, time and money for the project. Our clients wish to develop a
system that could automate these agricultural measurements using a robotic platform. An automated system would then reduce the personnel required, and the time spent by researchers gathering information about their specimens.
In this project, our group is designing a cooperative robotic system containing a ground vehicle and an instrumentation arm connected at a single pivot point. This instrumentation arm will then be balanced primarily by four propellers located at its top, with some assistance from the movement of the ground robot. Our main goal is to design and construct a laboratory proof of concept for such a cooperative system to demonstrate its feasibility.
|
Our Design
To the right is a concept diagram of the design idea we were given by our advisers. It consists of four main parts, the ground vehicle, the Instrumentation arm, the system of propellers, and a computer for wireless control and data logging. Figure 1 shows a simplified image of how everything interacts with each other. My Part
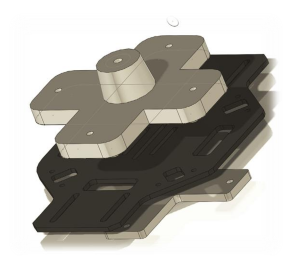
I have primarily been the hardware person in this project. I have designed a few parts in SolidWorks which are now used as modifications to the DJI Flamewheel frame we purchased. I have also been involved in the system which controls the quad-rotor system. This is a control system which takes feedback from a camera system and uses the quad rotor system to actuate the inverted pendulum. CAD
|
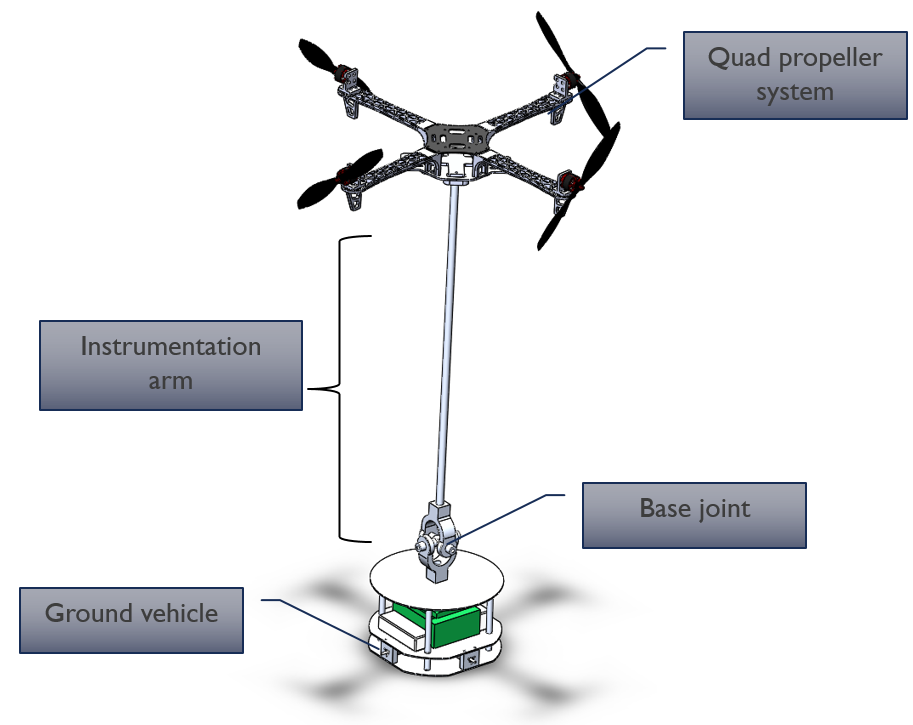
Concept model of our view of the end result of our project.
The Control SystemThe overall success of this project is reliant on the functioning of the stabilization control system. The pendulum must be able to balance itself in a vertical position. Otherwise, the measurements of the up to 9 foot corn could not be taken. A nice diagram of the control system is shown below.
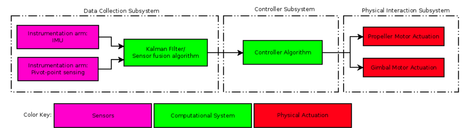
Here is a detailed diagram of the signal flow in the system.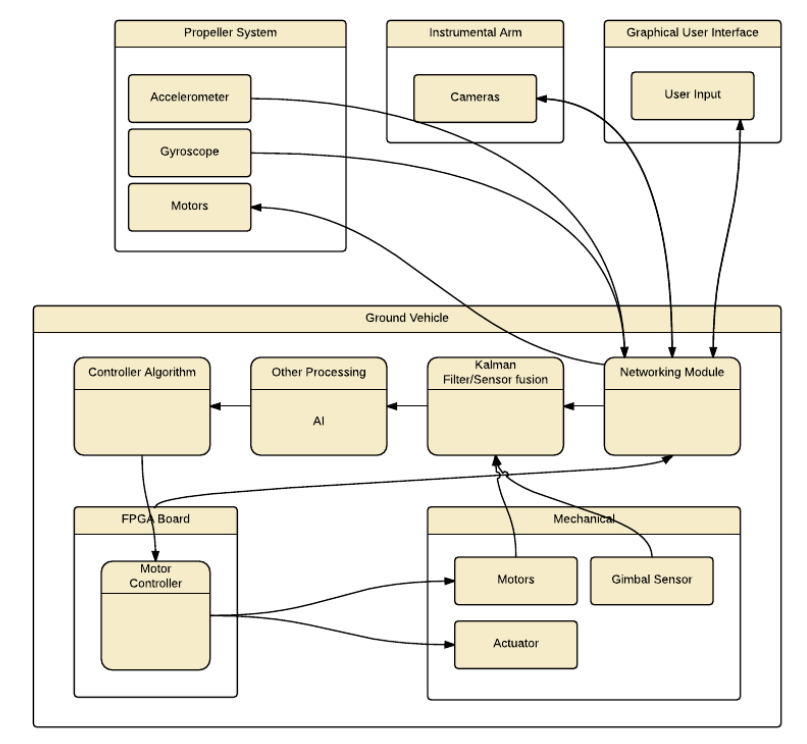
|


|
|
| ||||||
